视觉里程计(Visual Odometry, VO)是一种通过分析连续图像序列来估计相机或移动设备在空间中的运动(位置和姿态)的技术。它广泛应用于机器人、自动驾驶、无人机、增强现实等领域,是实现自主导航和环境感知的重要技术之一。
1. 基本原理与定义
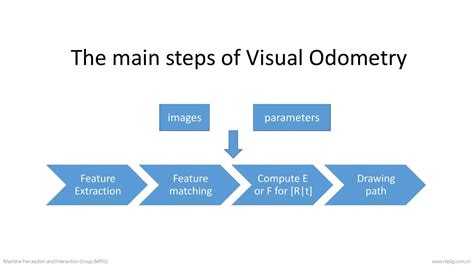
视觉里程计的核心思想是通过分析连续图像帧之间的差异,估计相机或移动设备的运动轨迹。其基本原理包括:
- 图像特征提取与匹配:通过提取图像中的关键点(如角点、特征点)并进行匹配,计算图像之间的相对运动。
- 运动估计:通过匹配的特征点或图像差异,计算相机的位姿变化(如旋转和平移)。
- 轨迹累积:通过连续帧的位姿估计,逐步构建设备的完整运动轨迹。
2. 主要方法与技术
视觉里程计的技术方法主要包括以下几种:
- 特征点法:通过提取图像中的特征点(如SIFT、SURF、ORB等)并进行匹配,计算相机运动。这种方法在噪声较大或运动较快的情况下表现较好,但计算复杂度较高。
- 直接法:不依赖特征点,直接通过像素强度差异计算运动,适用于稠密图像,但计算量较大。
- 混合方法:结合特征点法和直接法,以提高鲁棒性和效率。
- 深度学习方法:近年来,基于深度学习的视觉里程计方法(如DeepVOResNet)通过神经网络直接预测相机位姿,具有更强的鲁棒性和适应性。
3. 应用场景
视觉里程计广泛应用于以下领域:
- 自动驾驶:用于车辆的实时定位和导航。
- 机器人导航:用于移动机器人在未知环境中的自主导航。
- 增强现实(AR) :用于虚拟内容与真实环境的融合。
- 无人机:用于无人机在复杂环境中的自主飞行和定位。
- 三维重建:用于构建环境的三维模型。
4. 挑战与优化
视觉里程计面临的主要挑战包括:
- 漂移问题:由于累积误差,长时间运行后可能出现轨迹漂移。
- 环境依赖性:光照条件、纹理丰富度、动态场景等会影响性能。
- 计算复杂度:高精度的视觉里程计算法通常计算量较大,对硬件要求较高。
- 鲁棒性:在弱纹理、低光照或动态场景中表现不稳定。
为解决这些问题,研究者提出了多种优化方法,如传感器融合(如视觉惯性里程计VIO)、后端优化(如回环检测)、以及基于深度学习的端到端方法。
5. 开源工具与资源
视觉里程计领域有许多开源工具和资源可供研究和开发,例如:
- 开源算法库:如OpenCV、GTSAM、G2o、ORB-SLAM、LSD-SLAM、OKVIS等。
- 数据集:如KITTI数据集、BoofCV等,用于算法评估和训练。
- 代码库:如Modified PTAM、SVO、ROVIO等。
6. 未来发展方向
随着深度学习和传感器技术的发展,视觉里程计正朝着更高精度、更强鲁棒性和更高效的方向发展。未来的研究方向可能包括:
总结
视觉里程计是一种通过分析图像序列来估计相机或移动设备运动的技术,广泛应用于机器人、自动驾驶、增强现实等领域。尽管面临一些挑战,但随着技术的不断发展,视觉里程计在精度、鲁棒性和效率方面不断提升,为自主导航和环境感知提供了重要支持。
声明:文章均为AI生成,请谨慎辨别信息的真伪和可靠性!