点云分割(point cloud segmentation)是指将三维空间中的点云数据根据其空间、几何和纹理等特征进行划分,使得同一划分内的点云拥有相似的特征。这一过程通常用于识别和分离点云中的不同物体、结构或区域,以便进一步分析和处理。
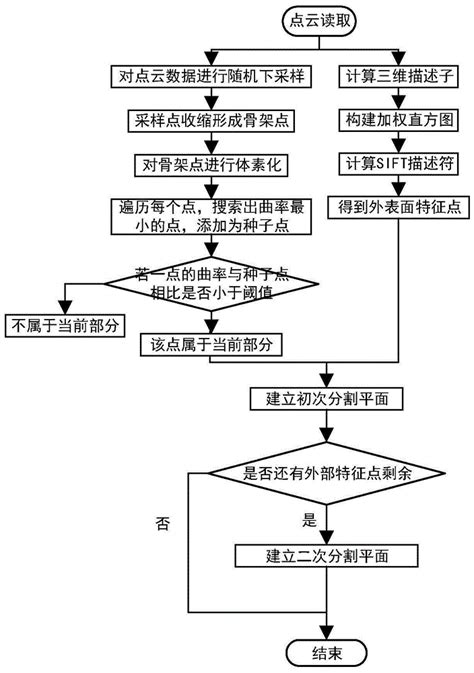
一种三维点云模型的分割方法 …
点云分割技术广泛应用于多个领域,如三维重建、逆向工程、自动驾驶、机器人导航等。 在这些应用中,点云的有效分割是许多后续处理步骤的前提条件。例如,在逆向工程CAD/CAM领域,需要对点云进行有效的分割以提取出平面模型或圆柱体模型。
点云分割的方法多种多样,包括基于边缘检测、区域增长、特征聚类、模型拟合以及基于图形优化的方法。此外,随着深度学习技术的发展,基于深度学习的点云分割方法也取得了显著进展,如PointNet、PointNet++和F-PointNet等网络结构被广泛应用于点云分割任务中。
点云分割的关键在于如何准确地确定分割边界,并且处理点云数据的无序性、密度不一致性、非结构性和信息不完整性等问题。为了提高分割精度,一些方法采用了滤波处理去除噪声、归类不同类别的激光点组以及基于密度的聚类算法等步骤。
总之,点云分割是三维点云数据处理的重要环节,通过将点云数据划分为具有相似属性的子集,可以更好地理解和分析三维环境中的物体和结构。
声明:文章均为AI生成,请谨慎辨别信息的真伪和可靠性!